Abstract
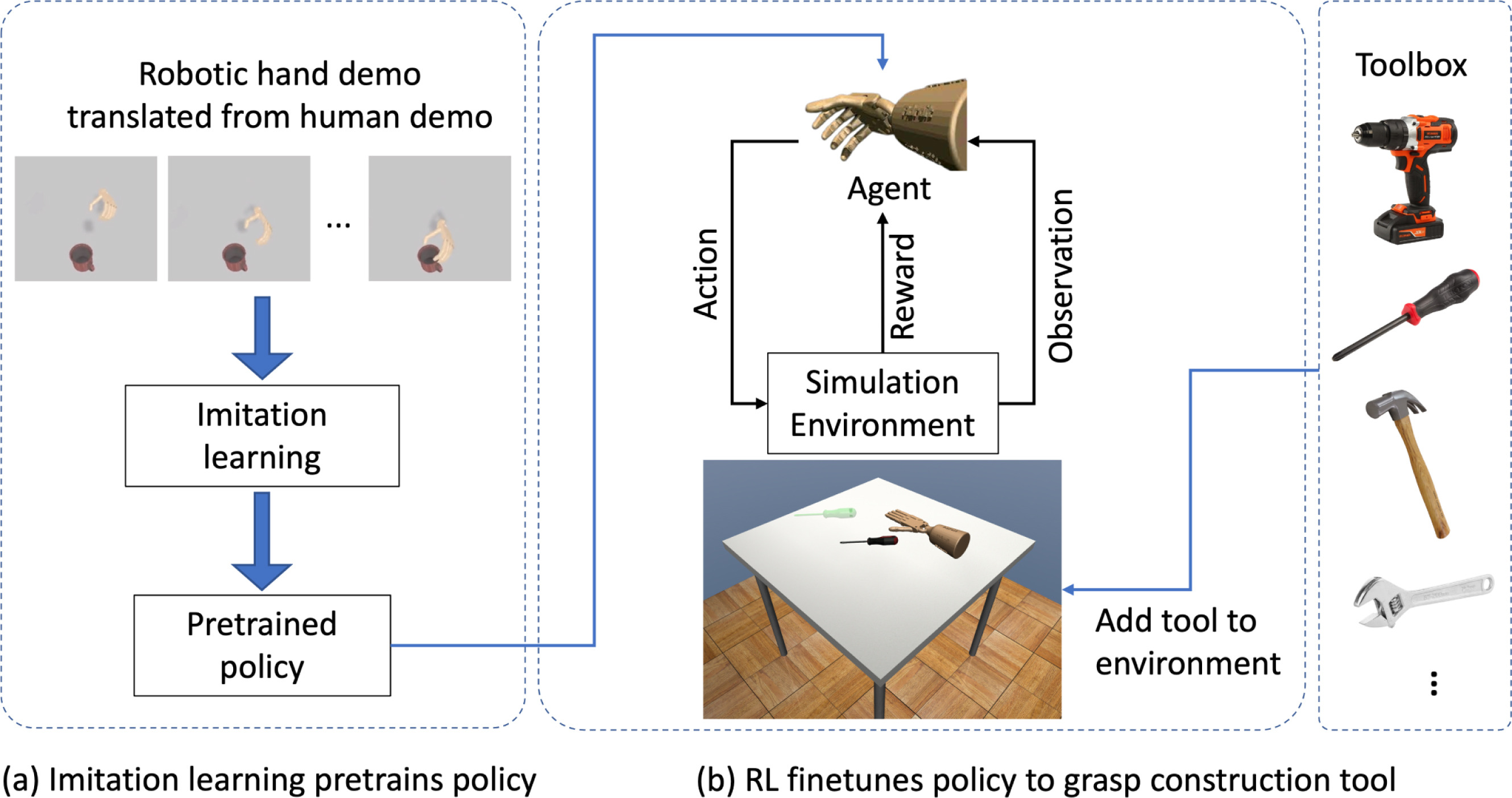
Emerging studies are utilizing reinforcement learning (RL) and imitation learning (IL) to control large-scale robots in heavy construction tasks. There is limited attention given to the automation of delicate tasks typically performed manually. This paper proposes the control of an anthropomorphic robotic hand with a high degree of freedom for the manipulation of construction tools in a learning-based approach. For controlling the robotic hand, a simulation-based policy learning framework based on pretraining policies through IL is presented, subsequently fine-tuning them for construction tool manipulation using RL. In experimental trials, six policies are trained for the robotic hand to grasp six different construction tools. The results indicate that each of the learned policies enables the robotic hand to manipulate the corresponding tool with an almost 100% success rate, demonstrating resilience when confronted with tools of different scales. Additionally, the paper showcases the potential for scaling up the fundamental policy for downstream applications.
Overview